面对突如其来的新冠病毒疫情,我国进入一级响应。疫情就是命令,防控就是责任,广大医务工作者冒着生命危险,奋战在抗击疫情的最前沿,疫情防控任务极其繁重。为减轻医务工作者工作强度,保障医务工作者安全,有效防止交叉感染,智能防疫遥操作机器人的研发势在必行。

图1 测温巡逻

图2 消毒防疫

图3 医用物品运送

(a)智能防疫遥操作机器人应用示意

(b)医务人员遥操作机器人

图5 遥操作机械臂原型样机
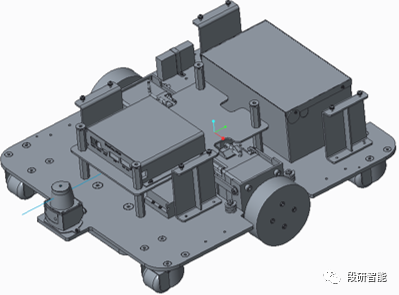
图6 移动机器人底盘
同时通过图像检测患者面部特征定位配合,通过红外监测患者体温。结合血氧、心率等生理特征,通过大数据分析,研发手机移动端监控界面,为医务工作者通过有效的可视化数据支撑,减少疫情期间医务工作者与重症确诊患者、疑似患者间的直接接触,提高医护工作的效率和安全系数。

图7 红外测温传感器
防疫机器人研发工作从2月初开始,团队成员克服各种困难,在紧急时刻投入到该项目的研发工作中。众志成城,共克时艰,以快、准、稳的步伐跑赢这场与病毒的比赛,是全体研发人员的共同目标。
研发进行中,拭目以待。